


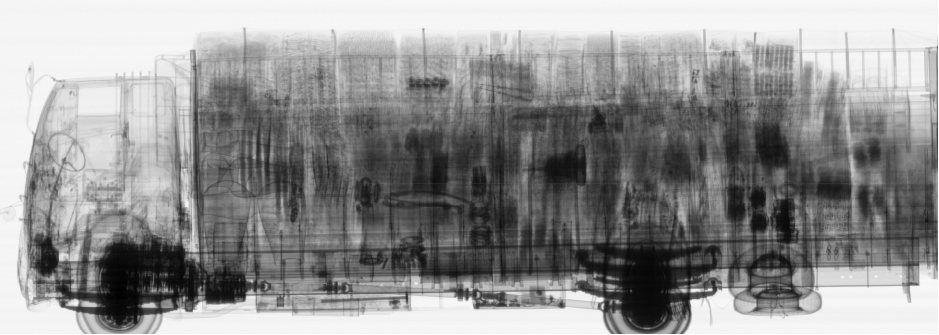
ਮੁੜ-ਸਥਾਨਯੋਗ ਕਾਰਗੋ ਅਤੇ ਵਾਹਨ ਨਿਰੀਖਣ ਪ੍ਰਣਾਲੀ
BGV6100 ਰੀਲੋਕੇਟੇਬਲ ਕਾਰਗੋ ਅਤੇ ਵਾਹਨ ਨਿਰੀਖਣ ਪ੍ਰਣਾਲੀ ਇੱਕ ਇਲੈਕਟ੍ਰਾਨਿਕ ਲੀਨੀਅਰ ਐਕਸਲੇਟਰ (ਲਿਨਕ) ਅਤੇ ਇੱਕ ਨਵਾਂ ਪੀਸੀਆਰਟੀ ਠੋਸ ਡਿਟੈਕਟਰ ਨਾਲ ਲੈਸ ਹੈ, ਜੋ ਕਿ ਦ੍ਰਿਸ਼ਟੀਕੋਣ ਸਕੈਨਿੰਗ ਅਤੇ ਇਮੇਜਿੰਗ ਕਾਰਗੋ ਅਤੇ ਵਾਹਨ ਨੂੰ ਪ੍ਰਾਪਤ ਕਰਨ ਲਈ ਦੋਹਰੀ-ਊਰਜਾ ਐਕਸ-ਰੇ ਅਤੇ ਉੱਨਤ ਸਮੱਗਰੀ ਪਛਾਣ ਐਲਗੋਰਿਦਮ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ, ਪਾਬੰਦੀਸ਼ੁਦਾ ਸਮਾਨ ਦੀ ਪਛਾਣ ਕਰਦਾ ਹੈ।ਸਿਸਟਮ ਦੇ ਦੋ ਕੰਮ ਕਰਨ ਵਾਲੇ ਮੋਡ ਹਨ: ਡਰਾਈਵ-ਥਰੂ ਮੋਡ ਅਤੇ ਮੋਬਾਈਲ ਸਕੈਨਿੰਗ ਮੋਡ।ਮੋਬਾਈਲ ਸਕੈਨਿੰਗ ਮੋਡ ਵਿੱਚ, ਸਿਸਟਮ ਮਾਲ ਗੱਡੀਆਂ ਨੂੰ ਸਕੈਨ ਕਰਨ ਲਈ ਜ਼ਮੀਨੀ ਰੇਲ 'ਤੇ ਚਲਦਾ ਹੈ।ਸਿਸਟਮ ਦੀ ਤੈਨਾਤੀ ਆਨ-ਸਾਈਟ ਵਰਤੋਂ ਦੀ ਸਹੂਲਤ ਨੂੰ ਧਿਆਨ ਵਿੱਚ ਰੱਖਦੀ ਹੈ।ਵਾਹਨ ਦੇ ਪ੍ਰਵੇਸ਼ ਦੁਆਰ 'ਤੇ ਇੱਕ ਓਪਰੇਸ਼ਨ ਕੰਸੋਲ ਸੈੱਟ ਕੀਤਾ ਗਿਆ ਹੈ।ਫਰੰਟ-ਐਂਡ ਗਾਈਡ ਕਰਮਚਾਰੀ ਵਾਹਨ ਦੇ ਤਿਆਰ ਹੋਣ ਤੋਂ ਬਾਅਦ ਨਿਰੀਖਣ ਪ੍ਰਕਿਰਿਆ ਸ਼ੁਰੂ ਕਰਨ ਲਈ ਜ਼ਿੰਮੇਵਾਰ ਹੁੰਦਾ ਹੈ, ਅਤੇ ਸਾਰੀ ਪ੍ਰਕਿਰਿਆ ਦੌਰਾਨ ਪੂਰੀ ਜਾਂਚ ਪ੍ਰਕਿਰਿਆ ਦਾ ਨਿਰੀਖਣ ਕਰ ਸਕਦਾ ਹੈ।ਇੱਕ ਵਾਰ ਜਦੋਂ ਕੋਈ ਅਸਧਾਰਨਤਾ ਪਾਈ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਜਾਂਚ ਪ੍ਰਕਿਰਿਆ ਨੂੰ ਤੁਰੰਤ ਰੋਕਿਆ ਜਾ ਸਕਦਾ ਹੈ।ਵਾਹਨ ਇਮੇਜਿੰਗ ਚਿੱਤਰ ਦੀ ਵਿਆਖਿਆ ਨੂੰ ਪੂਰਾ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਰੀਅਰ-ਐਂਡ ਵਾਹਨ ਚਿੱਤਰ ਦੁਭਾਸ਼ੀਏ ਕੰਸੋਲ ਰਾਹੀਂ ਫਰੰਟ-ਐਂਡ ਗਾਈਡ ਨਾਲ ਸੰਚਾਰ ਕਰ ਸਕਦਾ ਹੈ ਅਤੇ ਅਨੁਸਾਰੀ ਚੇਤਾਵਨੀ ਸਿਗਨਲ ਦੁਆਰਾ ਵਿਆਖਿਆ ਦਾ ਨਤੀਜਾ ਦੇ ਸਕਦਾ ਹੈ।
- ਵੱਡਾ ਥ੍ਰੋਪੁੱਟ, ਡਰਾਈਵ-ਥਰੂ ਮੋਡ 'ਤੇ ਪ੍ਰਤੀ ਘੰਟਾ 120 ਤੋਂ ਘੱਟ ਕਾਰਗੋ ਵਾਹਨ, ਅਤੇ ਮੋਬਾਈਲ ਸਕੈਨਿੰਗ ਮੋਡ 'ਤੇ ਪ੍ਰਤੀ ਘੰਟਾ 25 ਤੋਂ ਘੱਟ ਕਾਰਗੋ ਵਾਹਨ ਨਹੀਂ।
- ਡ੍ਰਾਈਵਰ ਲਈ ਰੇਡੀਏਸ਼ਨ ਸੇਫਟੀ, ਆਟੋਮੈਟਿਕ ਟਰੱਕ ਕੈਬ ਐਕਸਕਲੂਸ਼ਨ ਅਤੇ ਮੋਬਾਈਲ ਸਕੈਨਿੰਗ ਮੋਡ ਵਿੱਚ ਇੱਕ ਕੁੰਜੀ ਸਵਿੱਚ ਕਰਨ ਦਾ ਕੰਮ ਹੈ
- IDE ਤਕਨਾਲੋਜੀ, ਸਮੱਗਰੀ ਵਿਤਕਰੇ ਦਾ ਸਮਰਥਨ ਕਰਦੀ ਹੈ
- ਭਰਪੂਰ ਸਿਸਟਮ ਏਕੀਕਰਣ ਇੰਟਰਫੇਸ
- ਉੱਚ ਸਟੀਲ ਪ੍ਰਵੇਸ਼ ਸਮਰੱਥਾ
- ਉੱਨਤ ਚਿੱਤਰ ਜਾਣਕਾਰੀ ਪ੍ਰਬੰਧਨ ਸਿਸਟਮ.ਵਾਹਨ ਜਾਣਕਾਰੀ ਦੇ ਸਟੋਰੇਜ, ਪ੍ਰਾਪਤੀ, ਦੇਖਣ, ਨਿਰਯਾਤ ਅਤੇ ਹੋਰ ਫੰਕਸ਼ਨ, ਦ੍ਰਿਸ਼ਟੀਕੋਣ ਚਿੱਤਰਾਂ ਸਮੇਤ, ਨੈਟਵਰਕ ਕੇਂਦਰੀਕ੍ਰਿਤ ਪ੍ਰਬੰਧਨ ਫੰਕਸ਼ਨਾਂ ਦਾ ਸਮਰਥਨ ਕਰਦੇ ਹਨ।
- ਕਲਾਇੰਟ ਓਪਰੇਸ਼ਨ ਇੰਟਰਫੇਸ: ਸਾਜ਼ੋ-ਸਾਮਾਨ ਸਾੱਫਟਵੇਅਰ ਸਿਸਟਮ ਦੇ ਕਲਾਇੰਟ ਓਪਰੇਸ਼ਨ ਇੰਟਰਫੇਸ ਦਾ ਡਿਜ਼ਾਈਨ ਵਾਜਬ ਅਤੇ ਉਪਭੋਗਤਾ-ਅਨੁਕੂਲ ਹੈ, ਇੰਟਰਫੇਸ ਸਪਸ਼ਟ ਅਤੇ ਸੰਖੇਪ ਹੈ, ਓਪਰੇਸ਼ਨ ਸੁਵਿਧਾਜਨਕ ਹੈ, ਫੰਕਸ਼ਨ ਮੋਡੀਊਲ ਕੌਂਫਿਗਰੇਸ਼ਨ ਅਨੁਭਵੀ ਹੈ, ਲੇਆਉਟ ਵਾਜਬ ਹੈ, ਅਤੇ ਰੱਖ-ਰਖਾਅ ਆਸਾਨ ਹੈ.





